Construction Robotics Simulation Framework
Team Members: Mohammad Reza Kolani, Stavros Nousias, André Borrmann
Funding: TUM Innovation Network CoConstruct
Partners: TUM ED - Werkstoffe und Werkstoffprüfung im Bauwesen, TUM ED - Structural Design, TUM CIT - Machine Learning of 3D Scene Geometry, TUM ED - Digital Fabrication, TUM ED - Massivbau, TUM ED - Architecture and Building Construction, TUM CIT - Machine Learning for Robotics, TUM ED - Bauprozessmanagement, TUM SOT - Innovationsforschung, TUM CIT - Sicherheit, Performanz und Zuverlässigkeit lernender Systeme
Running Period: 01.01.2024-01.01.2027
The field of construction robotics is rapidly developing and holds significant promise for enhancing the productivity of the construction industry. Nevertheless, the automation achieved in construction by robotics systems has mostly remained at the level of isolated and highly specialized processes. However, robots have the capability to operate continuously throughout the day and night, thereby expediting project schedules and minimizing the likelihood of any interruptions. The process of creating and evaluating robotics systems in an actual setting pose difficulties and significant costs. Hence, it is imperative to conduct thorough testing and validation of these systems prior to their deployment on the construction site. Thereby, comprehensive simulation enhances our prediction and planning abilities, significantly decreasing the likelihood of mission failure, costly errors, and rework in the actual situation.
To address this challenge, the project emerged as an innovative initiative aiming to develop a reliable and effective construction robotics simulation framework allowing the integration of new types of robotic systems, sensors, and construction methods and facilitating the testing of diverse robotic systems in a range of scenarios. On the other hand, Building Information Modeling (BIM) is a significant development that offers numerous opportunities in the construction industry and has positive outcomes for engineers in the design, planning, facility management, and control processes. Therefore, it is important to combine Building Information Modeling (BIM) and robotics. Construction robotics simulation framework offer controlled conditions for integrating BIM in robotic simulations under various situations, all while avoiding the hazards and expenses involved with real-world experimentation.
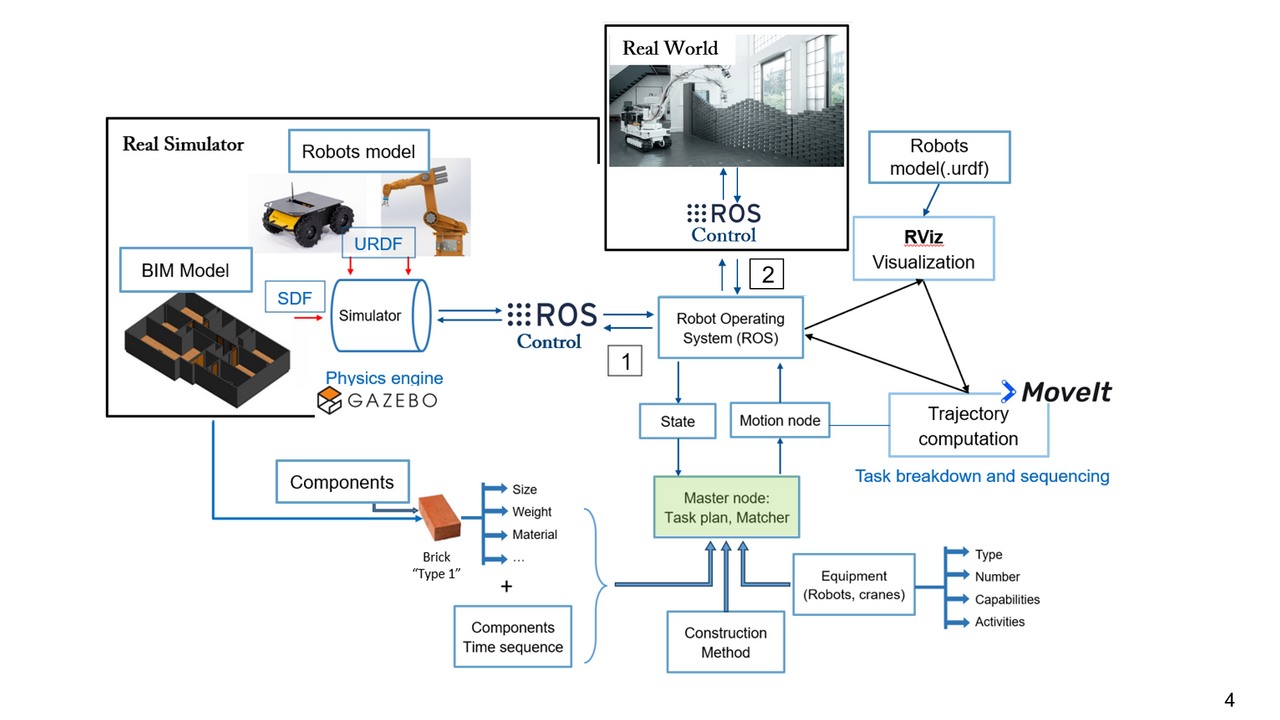
In this framework, cutting-edge approaches are deployed for task planning systems that can produce highly precise elemental movements (e.g., gripping, moving, picking, and placing) of robots utilizing robot motion planning, BIM, and construction sequencing. The framework relies on the incorporation of the Robot Operating System (ROS) as the underlying framework that facilitates communication among various nodes within the robotic collaboration system, as well as a powerful physic engine (e.g., Gazebo), which stands as a significant part of this framework. Leveraging a physics engine enables the creation of realistic simulations of construction activities. The integration of ROS, Gazebo, and motion planning is the fundamental basis of this framework, offering a comprehensive and versatile framework for simulating, planning, and executing collaborative construction tasks.